
















ニュースの要約
- ヴイストン株式会社が、自社製研究開発用台車ロボット向けに公開しているROS 2対応サンプルを追加
- SLAM(Simultaneous Localization and Mapping)による地図作成や自律移動のサンプルを追加
- ROS 2の活用を容易にし、研究開発の用途でさらに活用できるようになった
概要
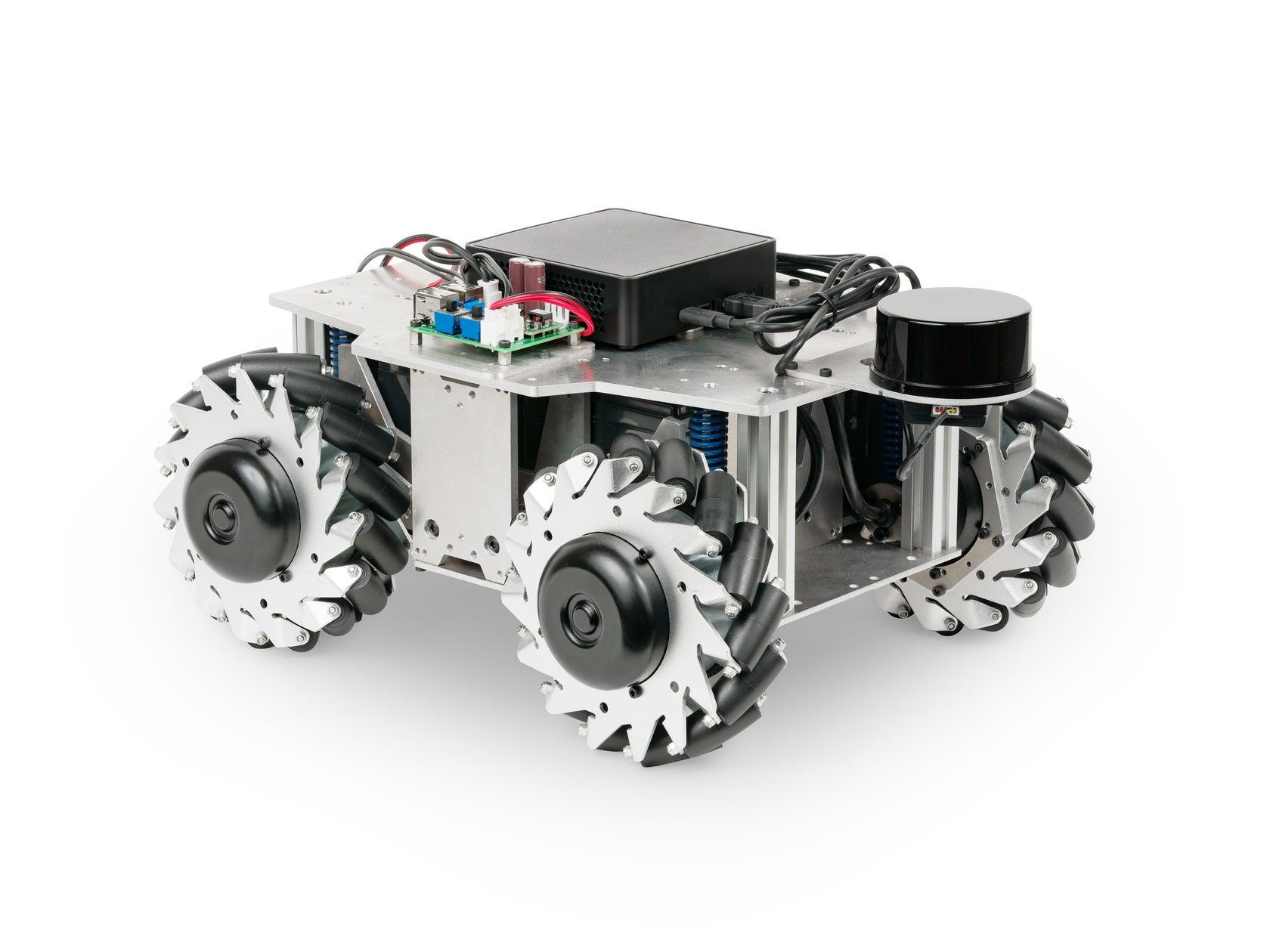
ヴイストン株式会社は、自社製の研究開発用台車ロボットシリーズに対応するROS 2サンプルを追加しました。
これまでに公開されていたサンプルに加え、SLAM(Simultaneous Localization and Mapping)による地図作成や、経路計画・追従・障害物回避を行う自律移動のサンプルを新たに公開しました。これにより、ROS 2をより容易に活用できるようになり、台車ロボットを用いた研究開発の幅が広がることが期待されます。
編集部の感想
研究開発に使える台車ロボットにROS 2のサンプルが追加されるのは、開発者にとってかなり助かりそうだ
地図作成や自律移動のサンプルが用意されていると、ロボットの機能を手軽に試せそう
オープンソースのフレームワークROS 2を活用できるのは魅力的で、研究開発の幅が広がりそう
編集部のまとめ
【ヴイストン】:研究開発用台車ロボットのROS 2サンプルを追加についてまとめました
今回のニュースでは、ヴイストン株式会社が自社の研究開発用台車ロボット向けにROS 2のサンプルを追加したことが明らかになりました。これまでは基本的な動作のサンプルが用意されていましたが、今回新たにSLAMによる地図作成や自律移動のサンプルが追加されたことで、ロボットの機能を手軽に試すことができるようになりました。
ROS 2はオープンソースのロボット用フレームワークで、幅広い用途で活用されているため、これらのサンプルを活用することで研究開発の幅が広がることが期待されます。台車ロボットを活用した研究開発を行っている開発者にとっては、大変有用な追加機能だと言えるでしょう。
参照元:https://prtimes.jp/main/html/rd/p/000000092.000038478.html

